Ecosistema de simulación para el control dinámico y monitoreo de seguridad de un manipulador robótico de 6 GDL
AUTORES
ELIAS ESCOBAR PEREIRA
KEVIN DAVID ORTEGA QUIÑONES
MAURICIO HOLGUIN LONDOÑO
GERMAN ANDRES HOLGUIN LONDOÑO
DESCRIPCIÓN DEL PROYECTO
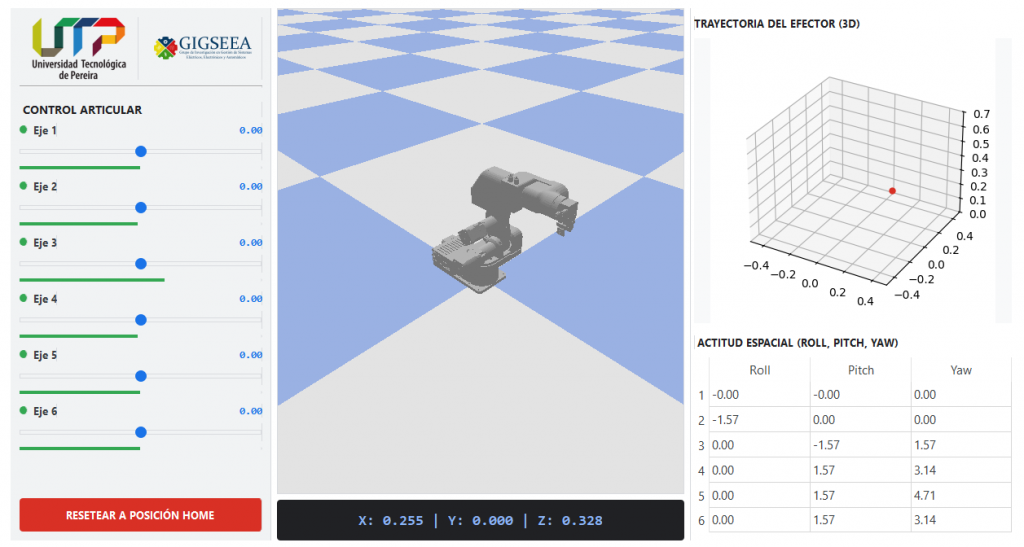
El presente proyecto consiste en el desarrollo de una plataforma de software orientada al control, simulación y monitoreo de un manipulador robótico de seis grados de libertad (6 GDL), integrando herramientas de visualización, análisis de datos y control interactivo en un entorno virtual.
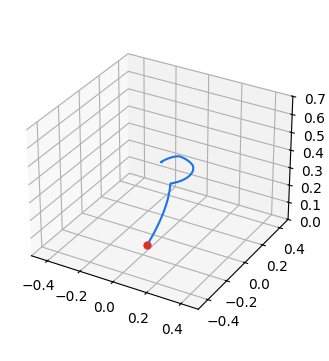
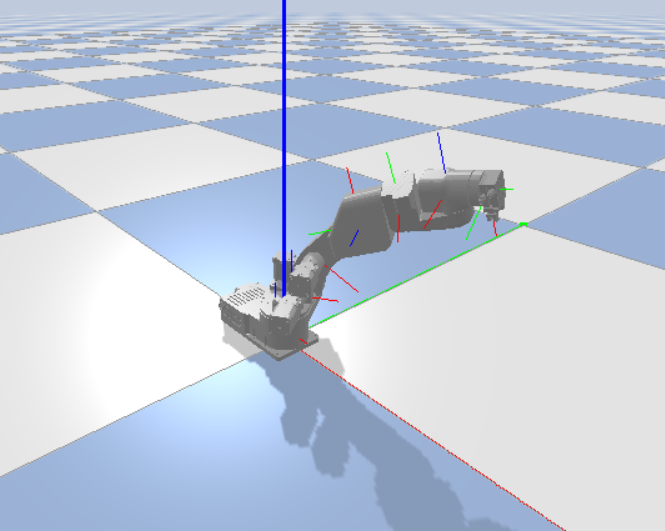
La propuesta surge como respuesta a la necesidad de contar con entornos accesibles que permitan validar el comportamiento de sistemas robóticos antes de su implementación en escenarios reales, reduciendo riesgos operativos y fortaleciendo los procesos de aprendizaje e investigación. En este sentido, el sistema desarrollado permite representar de manera dinámica el movimiento del robot, facilitando la interpretación de variables como la posición, orientación y trayectoria del efector final.
A través de una interfaz gráfica de usuario, se busca ofrecer una interacción intuitiva entre el usuario y el sistema robótico, permitiendo el control individual de las articulaciones y la visualización en tiempo real del comportamiento del manipulador. De igual manera, se integran herramientas de monitoreo que contribuyen al análisis del desempeño del sistema, apoyando la comprensión de conceptos fundamentales en robótica como la cinemática y el control de movimiento.
El proyecto también incorpora criterios de seguridad operativa, mediante la implementación de mecanismos de advertencia visual que permiten identificar condiciones cercanas a los límites de funcionamiento del sistema. Esto facilita la toma de decisiones en entornos de simulación y promueve prácticas seguras en el manejo de manipuladores robóticos.
OBJETIVO GENERAL
Desarrollar una plataforma de simulación y control que permita la visualización, monitoreo y análisis del comportamiento de un manipulador robótico de 6 grados de libertad en un entorno virtual controlado.
ALCANCE DEL PROYECTO
El sistema se enfoca en la construcción de un entorno de simulación que permita experimentar con el comportamiento de manipuladores robóticos, integrando elementos de control, visualización y análisis. Su uso está orientado principalmente a contextos académicos e investigativos, donde se busca fortalecer las competencias en robótica, automatización y sistemas digitales.
APLICACIONES POTENCIALES
- Formación académica en robótica y automatización
- Validación de trayectorias en entornos virtuales
- Apoyo a procesos de investigación en sistemas ciberfísicos
- Desarrollo de prototipos de control para manipuladores robóticos
- Simulación previa a implementación en hardware real
GALERÍA DEL PROYECTO

ESTADO DEL PROYECTO
Proyecto en desarrollo.
NOTA IMPORTANTE
La información técnica detallada, incluyendo arquitectura del sistema, algoritmos de control y desarrollo completo, no se encuentra disponible públicamente y puede ser consultada únicamente con fines académicos bajo autorización de los autores.
DERECHOS DE AUTOR
© 2026 – Proyecto en desarrollo
Todos los derechos reservados por sus autores
Prohibida su reproducción total o parcial sin autorización