ACTIVIDADES
El semillero desarrolla proyectos de investigación enfocados en sus líneas de trabajo, permitiendo a los estudiantes aplicar conocimientos teóricos en contextos reales.
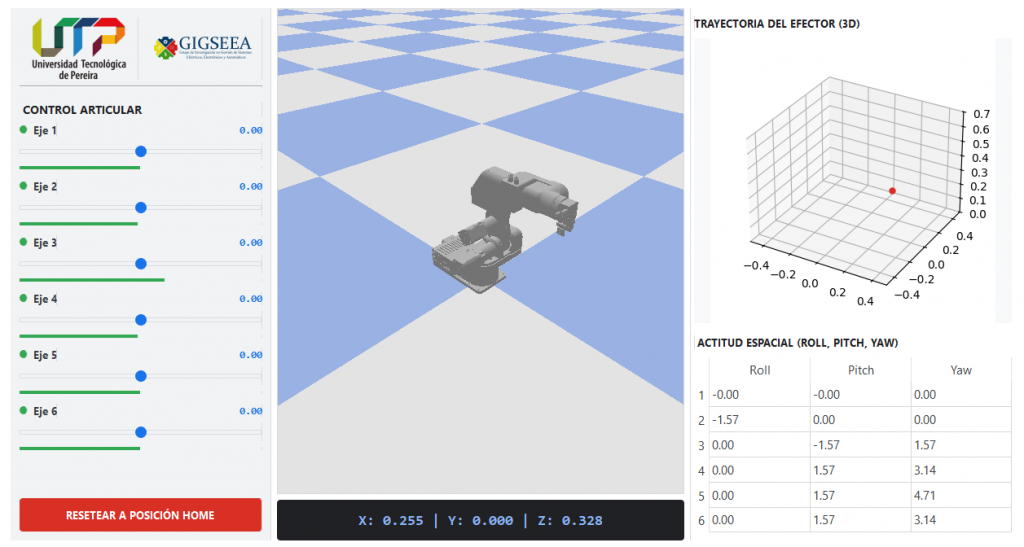
Desarrollo de un ecosistema de software para la visualización, monitoreo y análisis del comportamiento dinámico de un robot de 6 grados de libertad en entornos virtuales.

Desarrollo de un entorno interactivo de software para la simulación, visualización y análisis del comportamiento lógico de sistemas de control basados en lógica de escalera (LADDER) en entornos virtuales.